About Me
Shengmiao ("Samuel") Jin
I am a second-year Robotics Ph.D. student at Cornell University Ann S. Bowers College of Computing and Information Science, working on fine-grained, contact-rich dexterous manipulation and continual adaptation. I also work on tactile sensing and its integration into modern robot learning frameworks. My research is supported by the NSF Graduate Research Fellowship.
I am co-advised by Prof. Tapomayukh Bhattacharjee and Prof. Preston Culbertson. Before Cornell, I earned a B.S. in Electrical Engineering with Highest Honors from the University of Illinois Urbana-Champaign, where I worked with Prof. Wenzhen Yuan in the RoboTouch Lab.
Research
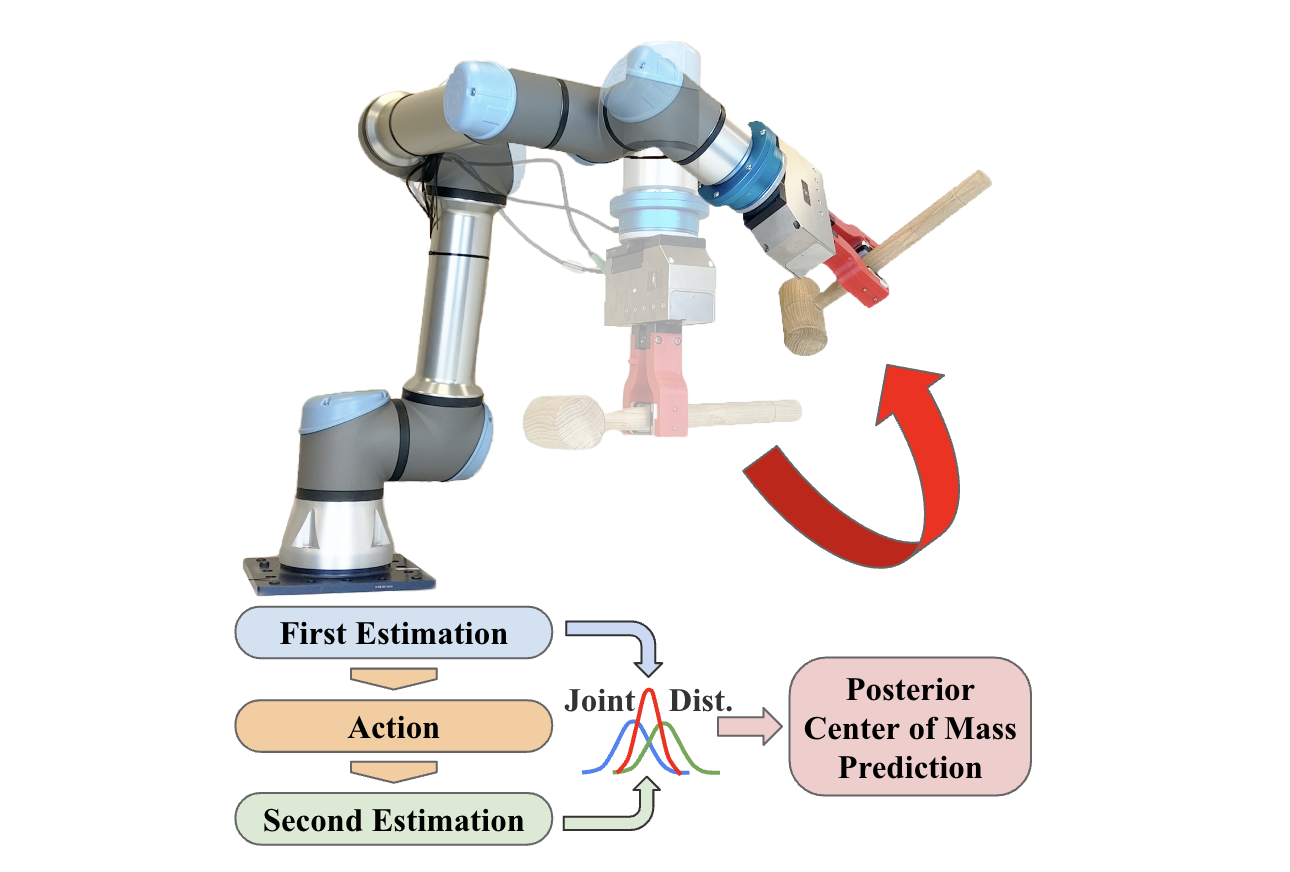
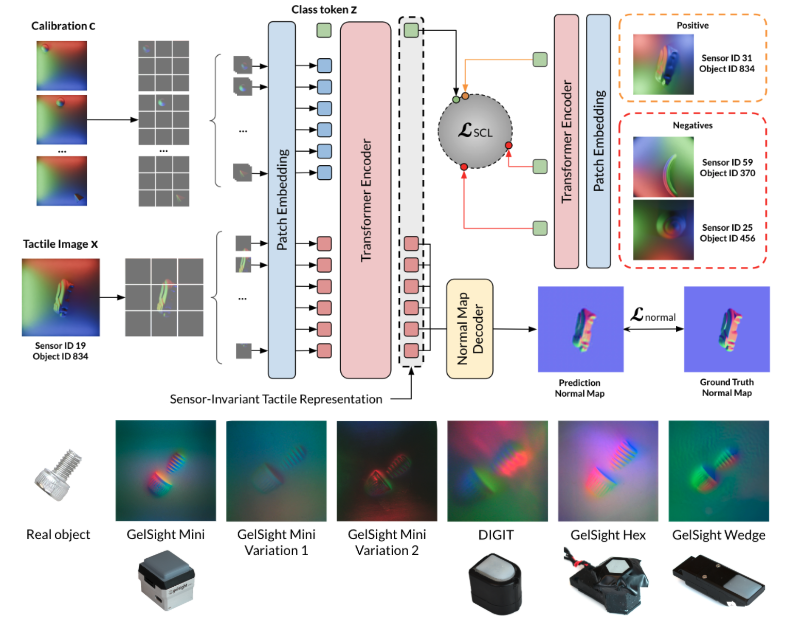
Contact-rich robot intelligence.
My research focuses on building robots that can learn from contact-rich interaction and adapt their behavior in the physical world. I am especially interested in fine-grained dexterous manipulation, tactile sensing, and continual adaptation: how robots can use touch, vision, and action to reason about objects, recover from uncertainty, and improve across tasks.
If you are excited about robot manipulation, tactile sensing, or robot learning, please feel free to reach out. I am always happy to chat with self-motivated students and collaborators from Cornell and beyond.
Publications
Selected publications.
Equal contribution is marked with *.
Teaching
Teaching experience.
CS 5757 - Optimization Methods for Robotics
Head Teaching Assistant · Cornell University
Supporting a graduate robotics course focused on optimization methods for planning, control, and learning.
CS 4750 - Foundations of Robotics
Teaching Assistant · Cornell University
Helping students build a foundation in robot kinematics, dynamics, perception, planning, and control.
ECE 311 - Digital Signal Processing Lab
Undergraduate Grader · University of Illinois Urbana-Champaign
ECE 210 - Analog Signal Processing
Undergraduate Grader · University of Illinois Urbana-Champaign
Misc
A few fun facts.
I was born and raised in Shenzhen in southern China, right next to Hong Kong. Whenever I travel internationally, I usually fly out of HKG, and I have taken the HKG-JFK route many times. Spoiler alert: not fun.
My Chinese name is 金聖苗 (金圣苗). My preferred English name, "Samuel," sounds similar to "Shengmiao," and my mom picked it from the Bible. The name "Leumas" is inspired by Horace Miner's work Body Ritual Among the Nacirema.
Outside of research, I enjoy reading, cooking, traveling, and playing or watching sports, including esports.