
Selected Publications
Equal contribution is indicated by *
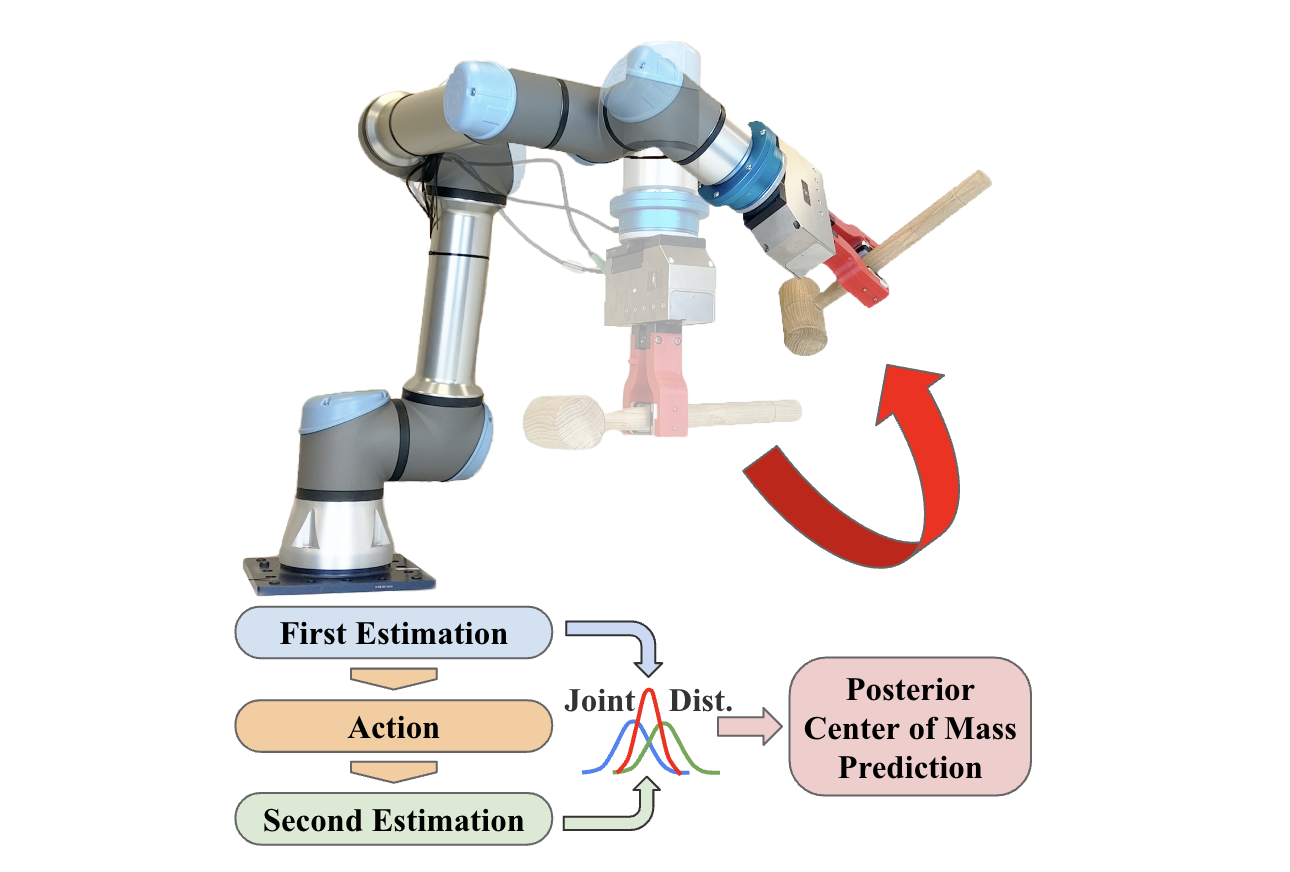
Learning to Double Guess: An Active Perception Approach for Estimating the Center of Mass of Arbitrary Objects
Shengmiao Jin, Yuchen Mo, and Wenzhen Yuan
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Paper] | [Website] | [Video]
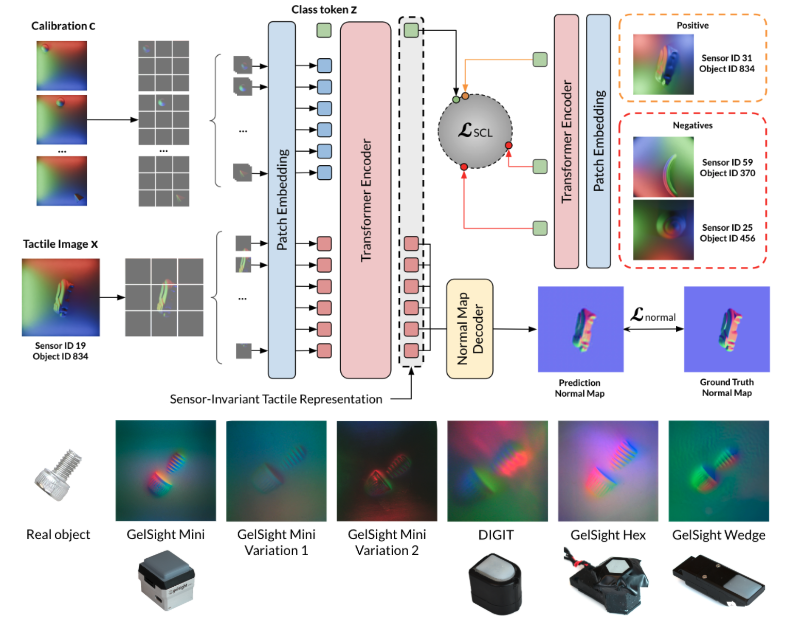
Sensor-Invariant Tactile Representation
Harsh Gupta *, Yuchen Mo *, Shengmiao Jin, and Wenzhen Yuan
International Conference on Learning Representations (ICLR), 2025
[Paper] | [Website]
An Intelligent Robotic System for Perceptive Pancake Batter Stirring and Precise Pouring
Xinyuan Luo *, Shengmiao Jin *, Hung-Jui Huang, and Wenzhen Yuan
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 (Best Entertainment and Amusement Papers Finalists)
[Paper] | [Youtube] | [bilibili] | [Website]
DoorBot: Closed-Loop Task Planning and Manipulation for Door Opening in the Wild with Haptic Feedback
Zhi Wang *, Yuchen Mo *, Shengmiao Jin, and Wenzhen Yuan
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Paper] | [Website]